The Autonomous Robotics and Perception Group
I joined ARPG halfway through Fall semester of my Junior Year. I was brought on initially to build hardware in support of the DARPA Subterranean Challenge Team, MARBLE. My first project was to design and fabricate a number of deployable communication beacons to be used in the subterranean environments. I then transitioned to a more research heavy role, and researched socially-aware navigation strategies. I was also involved in research on attention-based algorithms for visual perception, as well as a few smaller scale projects.
I've split up a few of these projects into separate pages, which can all be accessed below. Research with ARPG was a great first research experience.
Summer 2020 - Spring 2021
During my Senior year at CU I researched methods to effectively path plan and motion plan in populated environments. I looked at dynamic planning and replanning algorithms to avoid people, and ways to learn socially acceptable navigation behavior through deep reinforcement learning.

Fall 2020 - Spring 2021
I worked alongside a PhD student in the lab to develop smart algorithms to control a gimbaled camera in order to focus on important features for map building, localization or object detection.
Fall 2019
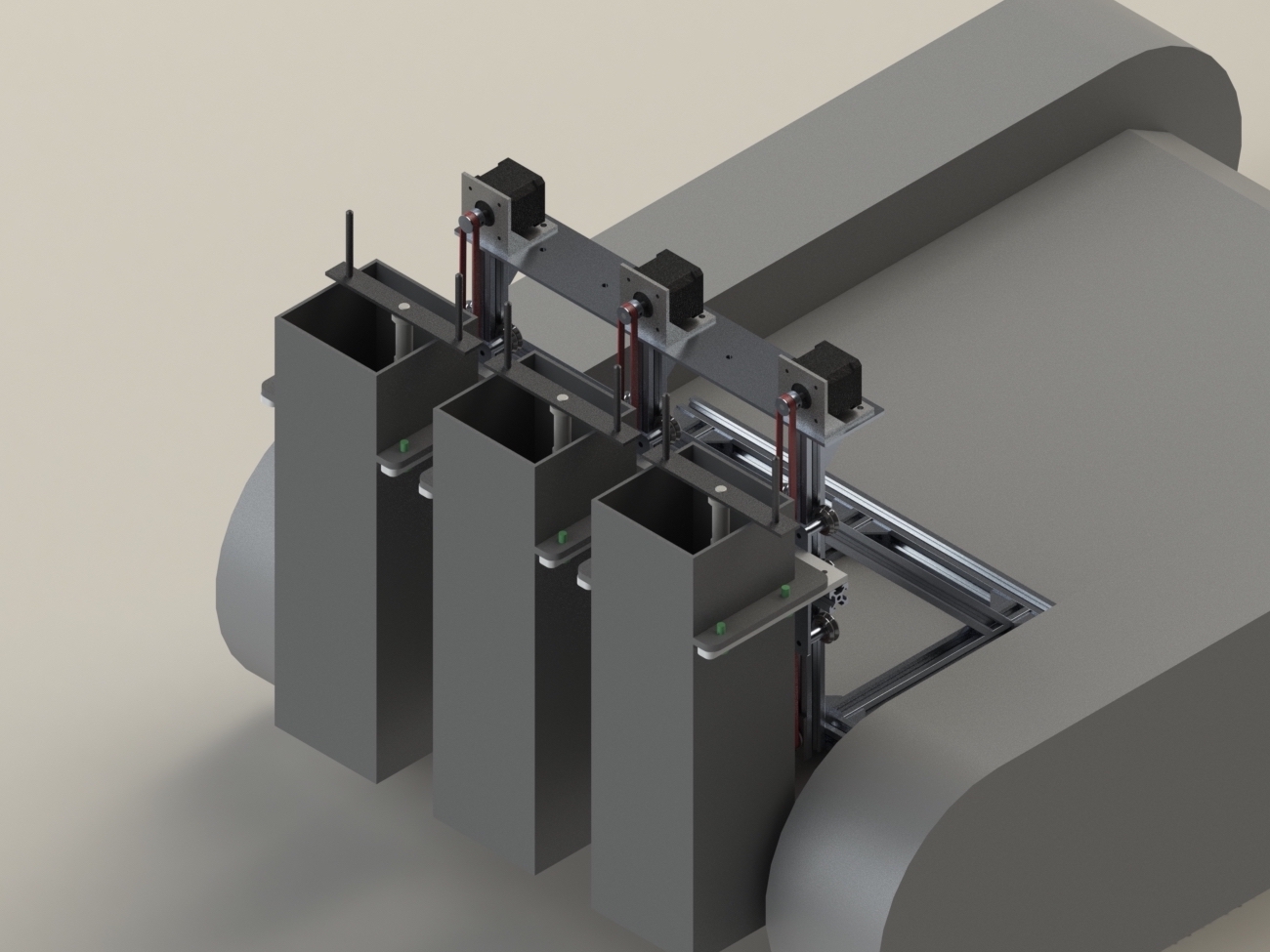
I designed and built these deployable communications beacons, with some help from other students in the lab, to be used in the DARPA Subterranean challenge.