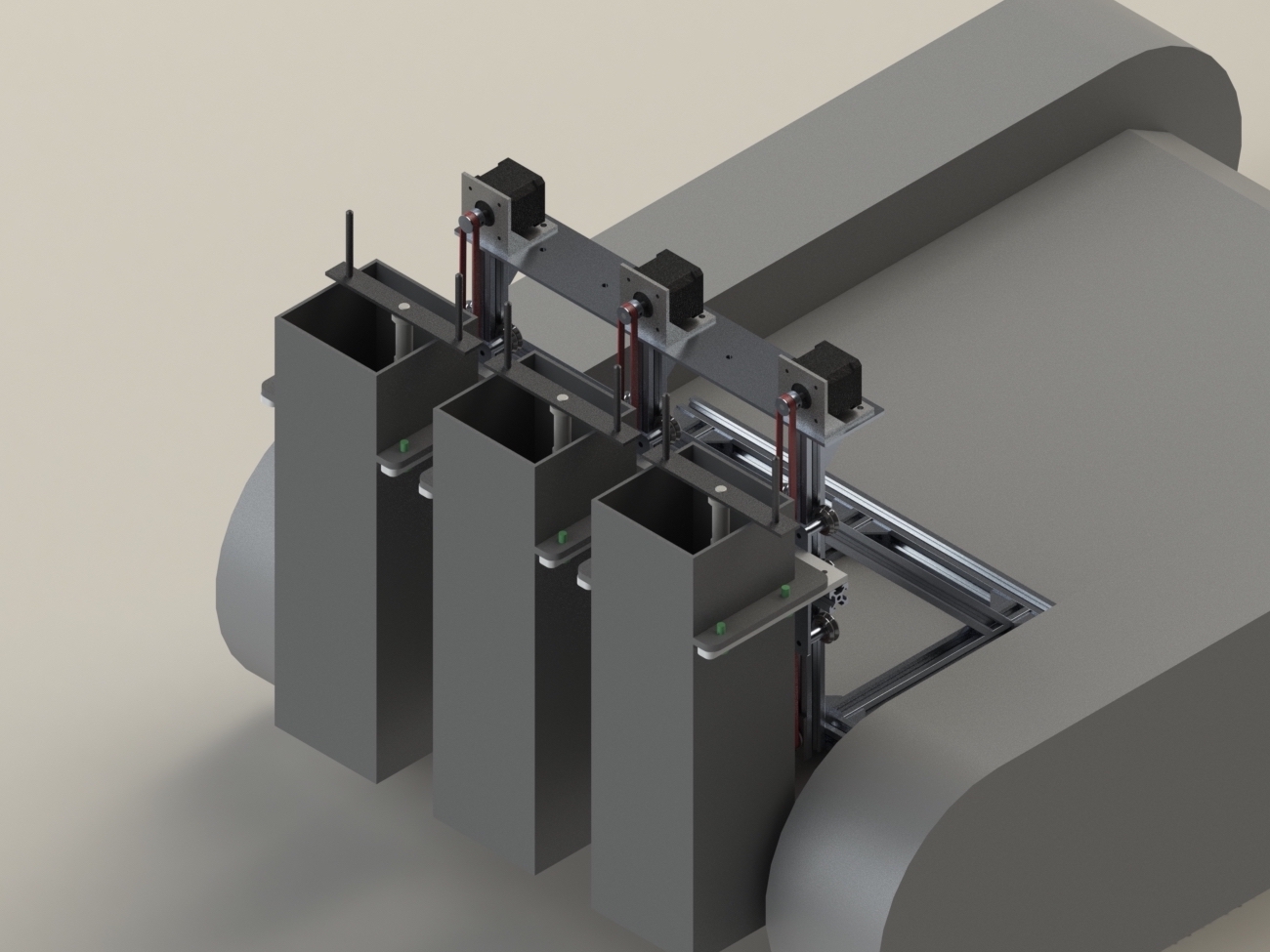
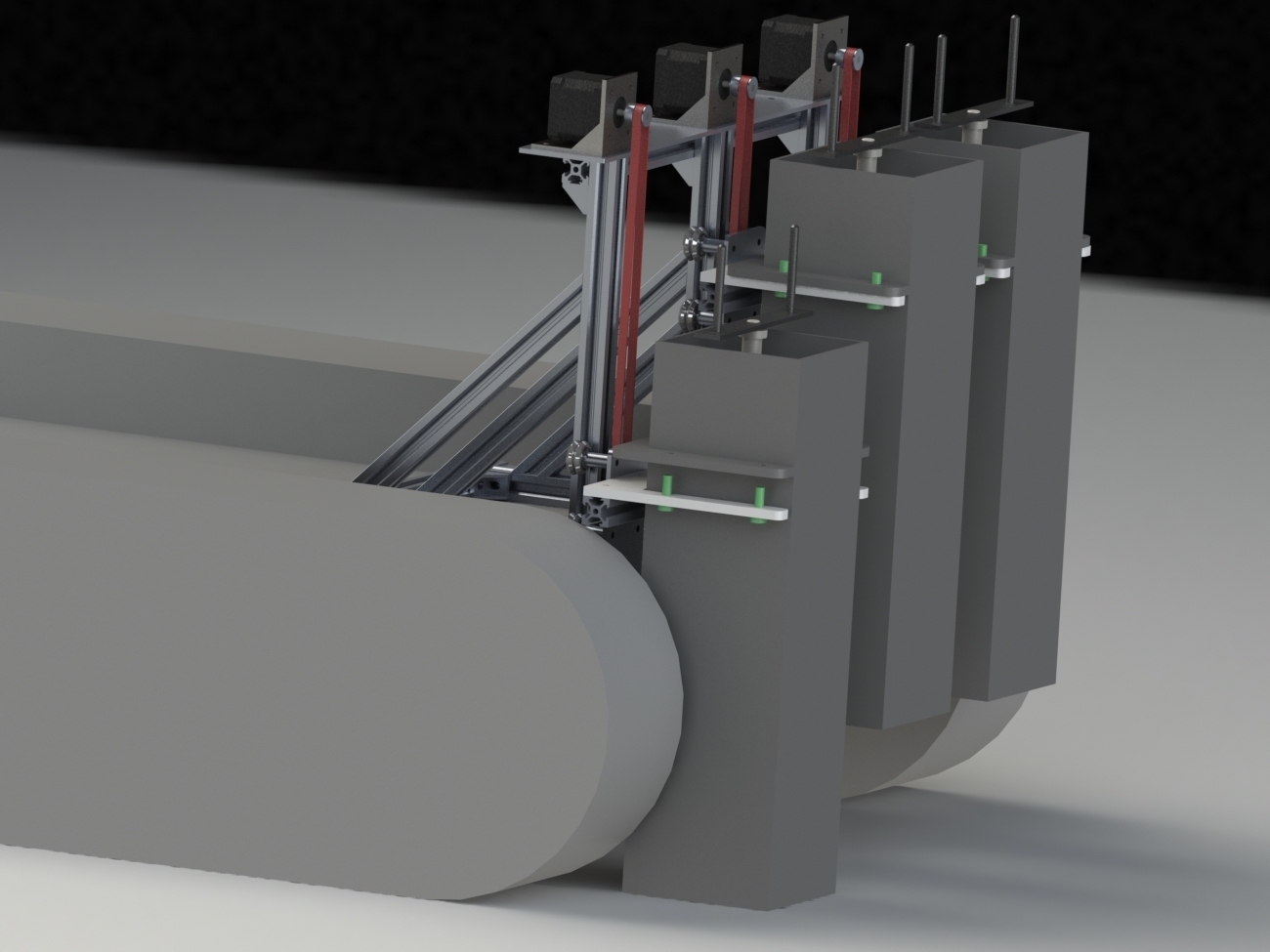


A preliminary CAD view of a radio deployment system. There are three independent linear actuators that each hold a radio package. Each package includes a transmitter and telescoping antenna.
A view of the proposed deployment. The package can be lowered down to the ground, and the pins on the fork released.
A view of the final state of the package. The robot can be driven away while the antenna is raised.
Most of the completed hardware for the beacon project. A few of the beacons and one of the deployment systems is missing from the shot.
A close up of one of the prototype communication beacons. All of the electronics are housed on a removable card. Its really just a fancy wifi router with an extendable antenna.
A close up of one of the deployment systems. There are just 3 really simple linear actuators with forks that mate with the beacons.
About this project
This was the first project I took on as a part of ARPG. I was brought on with two other students to see the project through, and I ended up taking the lead on the project. MARBLE is the DARPA Challenge team based out of CU, and more specifically ARPG. The beacons are used as repeaters to communicate between robots during the challenge, as well as to relay data back to the base station.
Our design requirements were to create an extendable beacon system that could be carried and deployed aboard the robots used for the DARPA challenge. We opted to go with a simple fork-lift-like deployment system, and car power antennas in plastic enclosures for the actual communication beacons.
We ended up building 12 of these beacons, and 3 sets of deployment systems. This system was used in the Urban Stage of the Subterranean Challenge.
Overall this project was a great mix of mechanical hardware, electronics and software. I learned a lot about optimizing design for efficient assembly, as well as documentation and design communication skills so that others could build my design.